Home
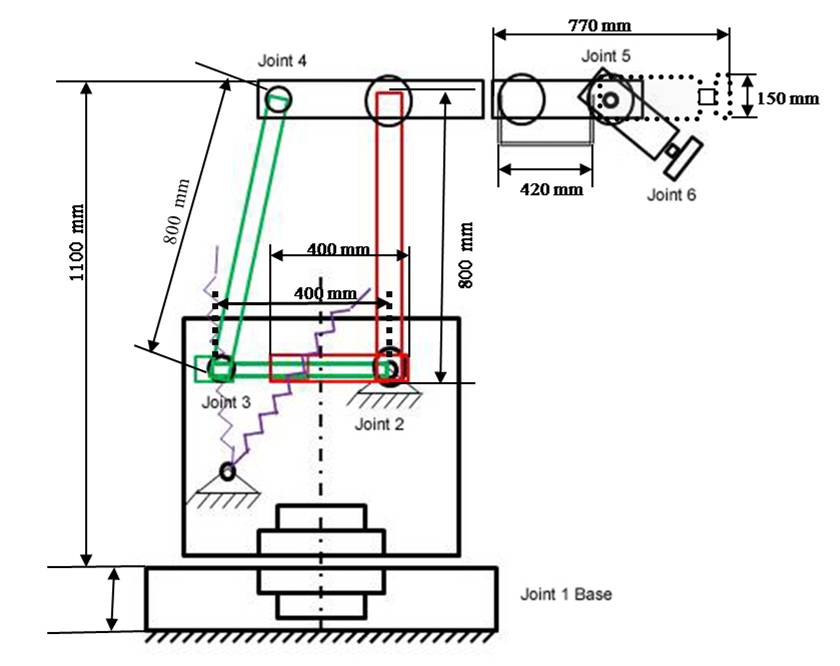
Specification
Tutorial
Animation
Simulation
Online Control
Self Evaluation
Welcome To
IIT-Kharagpur Virtual Laboratory
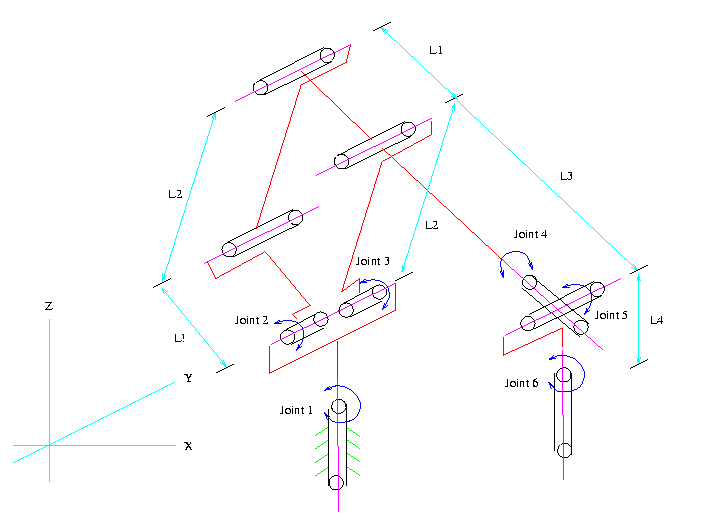
Industrial Robot KGP 50
WorkSpace Envelope
Math Model
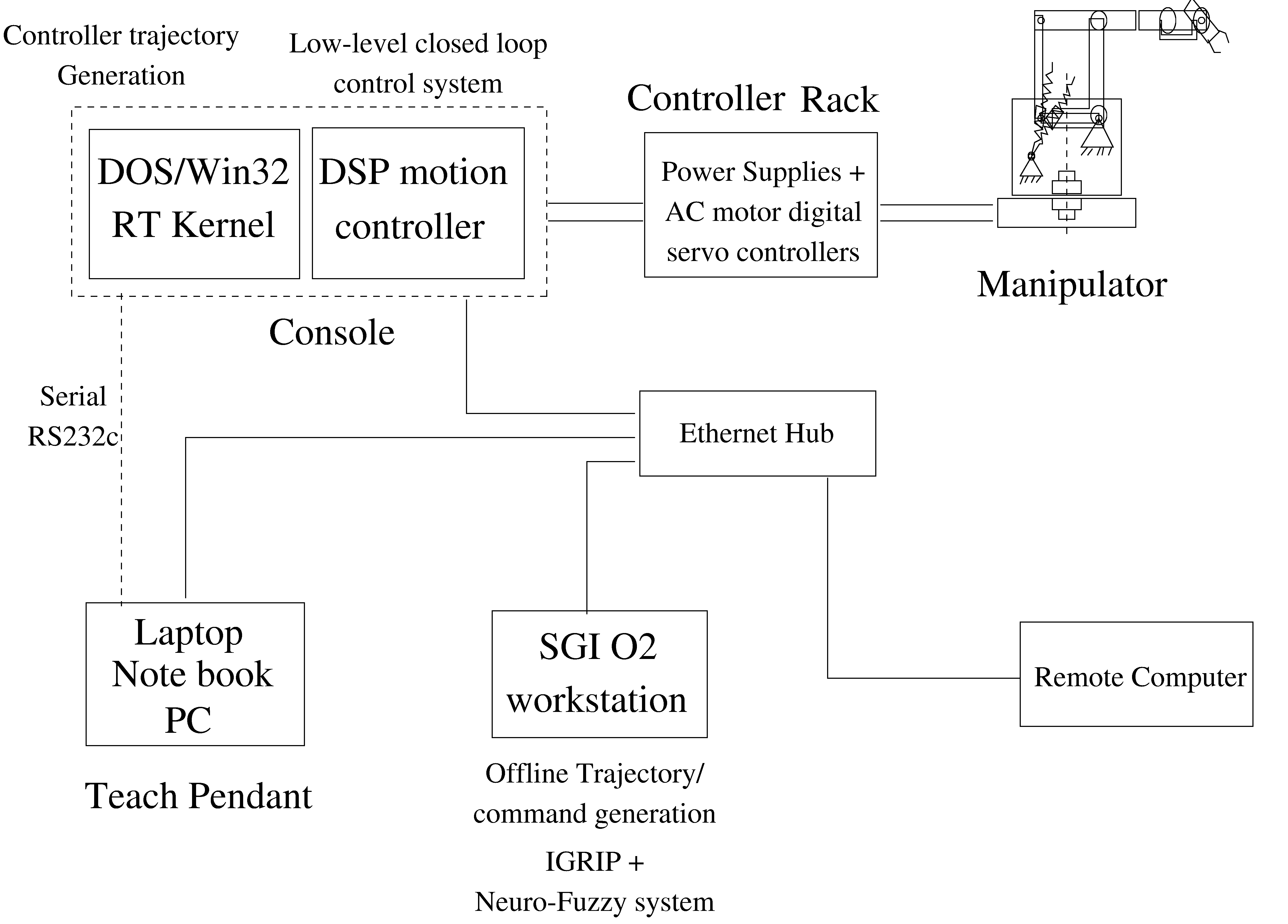
Controller
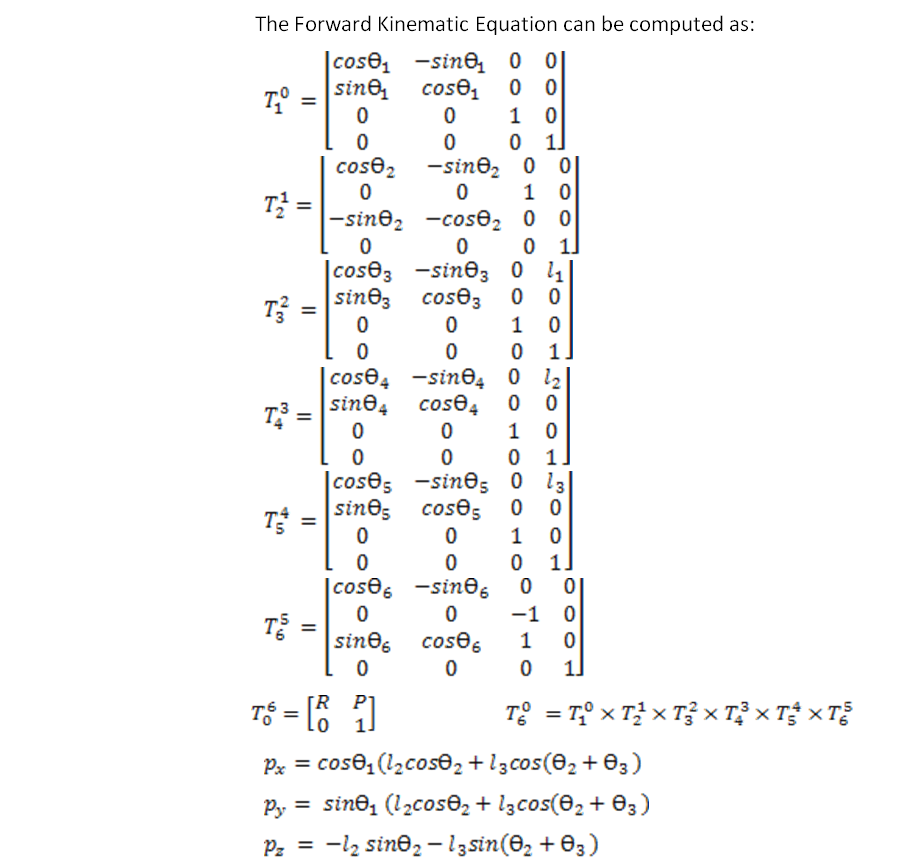
Forward Kinematics