 Indian Institute of Technology - Kharagpur
Indian Institute of Technology - Kharagpur
PROPORTIONAL-DERIVATIVE-INTEGRAL CONTROL (DISCRETE-TIME)
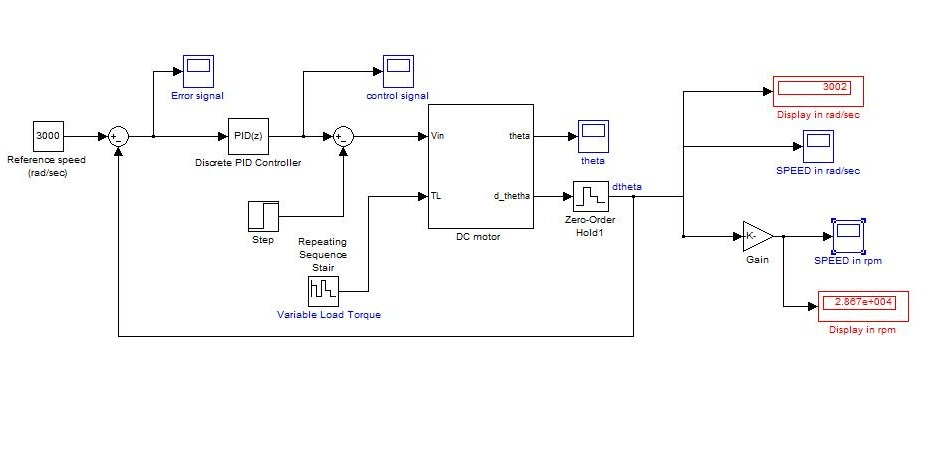
The analysis for designing a digital implementation of a PID controller in a Microcontroller (MCU) or FPGA device requires the standard form of the PID controller to be discretised. Approximations for first-order derivatives are made by backward finite differences.
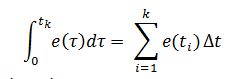
The integral term is discretised, with a sampling time
The derivative term is approximated as:
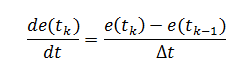
which gives us: