 Indian Institute of Technology - Kharagpur
Indian Institute of Technology - Kharagpur
WITH DC MOTOR
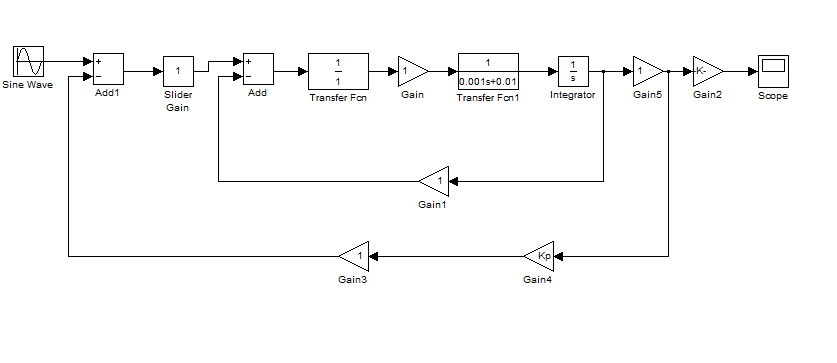
Modeling and Control of a one degree of freedom motorized robot arm is done. The arm is moved horizontally.
In this system the robot the DC motor moves the robot arm to the proper angular position according to the input.
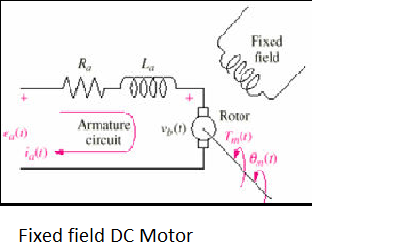
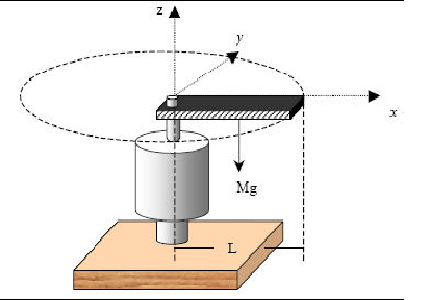
TORQUE
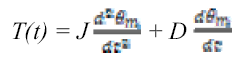
Thetam = motor shaft angle position J= All inertia connected to the motor shaft. D= All friction connected to motor shaft.