* -To identify the geometric relationship between input and output motions of a robot manipulator(viz. PUMA 560)
* -Know how a homegenous transformation matrix can be used to establish relationship between succesive links of a manipulator
* -Show how a kinematic chain of a PUMA 560 with six joints is represented in a forward kinematic chain.
* -Make Matlab codes for the forward kinematics of PUMA 560
* -Simulate the motion of the robot for various inputs.
 Indian Institute of Technology - Kharagpur
Indian Institute of Technology - Kharagpur
dedicated to the service of nation
Objectives
PREVIEW OF THEORY
* Programmable Universal Machine for Assembly, more popularly known as PUMA is an industrial robot arm developed by Victor Scheinman at Unimation, in the year 1978.PUMA comes in various makes viz. PUMA 260, PUMA 560, PUMA 761 etc. Our study here is concentrated on the PUMA 560 robot as we have direct access to it through our labs and can be used to verify our software.
* The theory for mathematical computations was obtained from a wide variety of sources encompassing books and internet. The entire idea in short is to use a cad file of the model of PUMA 560 and use the principles of Forward Kinematics to get the new orientation of the PUMA robot, as per the parameters specified by the user. General Terminology in Robotics :
Workspace:
The reachable workspace of a robot's end-effector is the manifold of reachable frames.
Accuracy:
Accuracy refers to a robot's ability to position its wrist end at a desired target point within the work volume, and it is defined in terms of spatial resolution. It depends on the technology and the control increments.
Repeatability:
Repeatability is a statistical term associated with accuracy. If a robot joint moves by the same angle from a certain point a number of times, all with equal environmental conditions, the target is always missed by a large margin. If the same error is repeated, then we say that the repeatability is high and the accuracy is poor.
Safety:
The ability to reduce the human-robot impact force and ensure human safety is a fundamental requirement for human-friendly robots.
Forward Kinematics :
Forward kinematics (FK) mainly deals with constructing a Denavit-Hartenberg (D-H) transformation matrix with Puma's parameters obtained from a D-H parameter table shown below :
Table 1. Puma 560 D-H parameter table
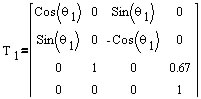
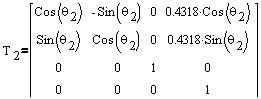
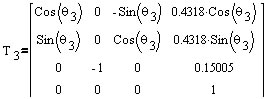
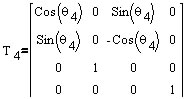
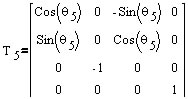
Transformation matrices of six joints :


Puma kinematic diagrams :
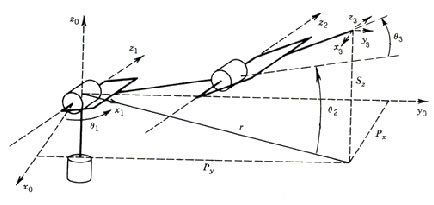
Fig. 3 Six transformation matrices for Puma 560 robot.
Simplified drawing of first three links of Puma 560 with transformation frames appropriately
* The theory for mathematical computations was obtained from a wide variety of sources encompassing books and internet. The entire idea in short is to use a cad file of the model of PUMA 560 and use the principles of Forward Kinematics to get the new orientation of the PUMA robot, as per the parameters specified by the user. General Terminology in Robotics :
Workspace:
The reachable workspace of a robot's end-effector is the manifold of reachable frames.
Accuracy:
Accuracy refers to a robot's ability to position its wrist end at a desired target point within the work volume, and it is defined in terms of spatial resolution. It depends on the technology and the control increments.
Repeatability:
Repeatability is a statistical term associated with accuracy. If a robot joint moves by the same angle from a certain point a number of times, all with equal environmental conditions, the target is always missed by a large margin. If the same error is repeated, then we say that the repeatability is high and the accuracy is poor.
Safety:
The ability to reduce the human-robot impact force and ensure human safety is a fundamental requirement for human-friendly robots.
Forward Kinematics :
Forward kinematics (FK) mainly deals with constructing a Denavit-Hartenberg (D-H) transformation matrix with Puma's parameters obtained from a D-H parameter table shown below :
Link |
a (m) |
(deg) |
d (m) |
(deg) |
1 |
0 |
90 |
0.67 |
* |
2 |
0.4318 |
0 |
0 |
* |
3 |
0.4318 |
-90 |
0.15005 |
* |
4 |
0 |
90 |
0 |
* |
5 |
0 |
-90 |
0 |
* |
6 |
0 |
0 |
0 |
* |
Table 1. Puma 560 D-H parameter table
Transformation matrices of six joints :
Puma kinematic diagrams :
Fig. 3 Six transformation matrices for Puma 560 robot.
Simplified drawing of first three links of Puma 560 with transformation frames appropriately
Procedure
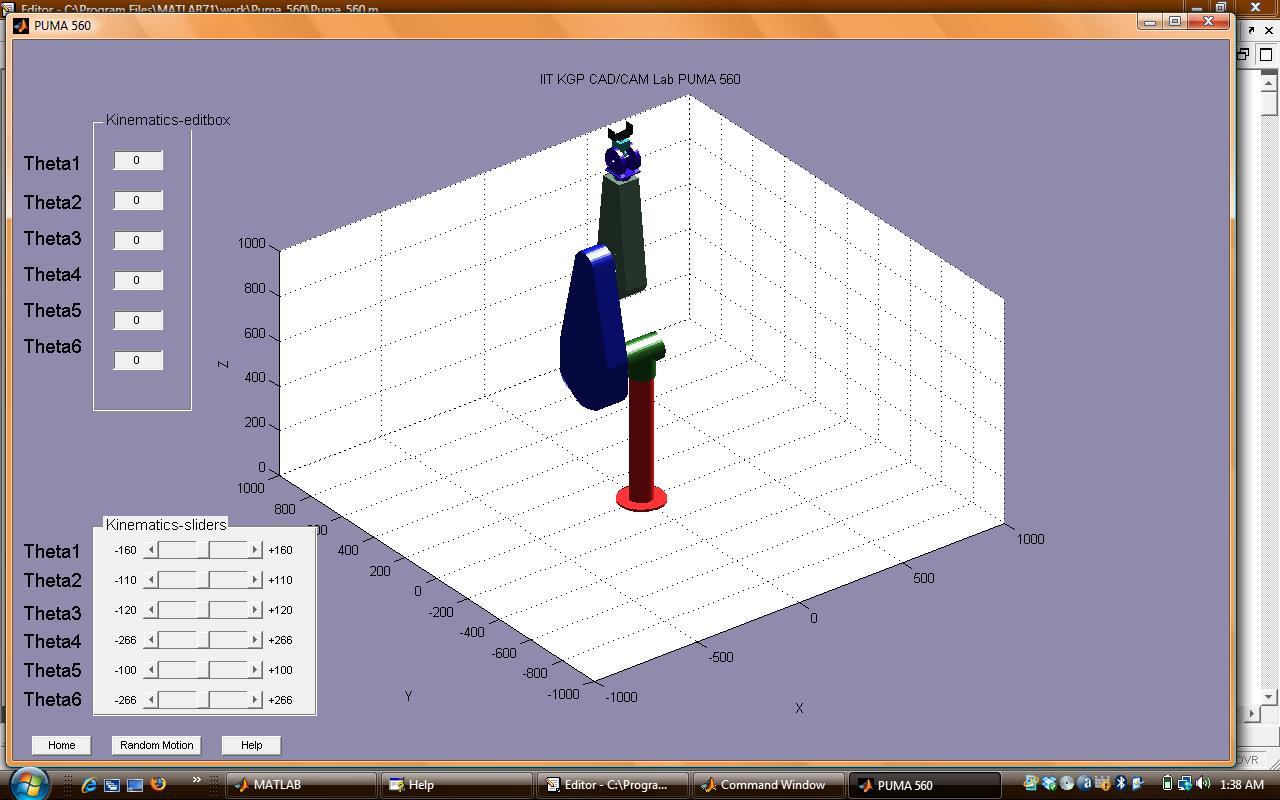
This program simulates a 7 link 3D Puma Robot using the cad2matdemo program. The software derives the data, to develop simulation of PUMA 560, from the CAD file imported to Matlab using cad2matdemo.m. The software then uses this data to produce the simulation of the motion specified by user.
The software interacts with the user through a GUI, where it takes input from the user in terms of the angular motion of different arms, and shows the output in the form of a simulation. The angular displacement can be provided by either a slider with a discrete variation or directly a numerical value can be provided in a text box.The software doesn�t allow for the specification of angular speed or acceleration of the arms. These values are fixed in the code.
Kinematics Panel consists of

Besides these, the GUI has the following buttons : Random: A random input is provided and the robot animates between locations.
Home: This button brings the PUMA 560 robot to its default upright position.
Help: It contains some general help topics for the user.
Below is a picture of the GUI as it would appear on the users screen :
Kinematics Panel consists of
Besides these, the GUI has the following buttons : Random: A random input is provided and the robot animates between locations.
Home: This button brings the PUMA 560 robot to its default upright position.
Help: It contains some general help topics for the user.
Below is a picture of the GUI as it would appear on the users screen :
Here is the link to the pdf file :
Q & A
What is PUMA 560 ?
The PUMA 560(Programmable Universal Machine for Assembly, or Programmable Universal Manipulation Arm) is a six degree of freedom robot manipulator. The end-effector of the robot arm can reach a point within its workspace from any direction. The six degrees of freedom are controlled by six brushed DC servo motors, each coupled with a 500-1000 count 3 channel encoder and a potentiometer
What is forward kinematics ?
Forward kinematics is computation of the position and orientatio of robot's end effector as a function of its joint angles. It is widely used in robotics, computer games, and animation. For a serial chain of n links, and let ?i be the angle of link i. Given ?0 ... ?n, the frame of link n relative to link 0 is: Where i - 1Ti (?i) is the transformation matrix from the frame of link i to link i -1.
What is D-H parameter ?
A commonly used convention for selecting frames of reference in robotics applications is the Denavit and Hartenberg (D-H) convention which was introduced by Jaques Denavit and Richard S. Hartenberg In this convention, each homogeneous transformation is represented as a product of four basic transformations. The common normal between two lines was the main geometric concept that allowed Denavit and Hartenberg to find a minimal representation. The transformation is described by the following four parameters known as D-H Parameters
* : length
* : twist
* : offset
* : angle
What is workspace ?
The reachable workspace of a robot's end-effector is the manifold of reachable frames. The dextrous workspace consists of the points of the reachable workspace where the robot can generate velocities that span the complete tangent space at that point, i.e., it can translate the manipulated object with three degrees of freedom, and rotate the object with three degrees of rotation freedom.
What is accuracy ?
Accuracy refers to a robot's ability to position its wrist end at a desired target point within the work volume, and it is defined in terms of spatial resolution. At first accuracy depends on robot technology and how closely the control increments can be defined for each of the joint motions, excluding for the moment the mechanical inaccuracy which include the robot manufacture quality.
What is Repeatability ?
Repeatability is a statistical term associated with accuracy, it describes how a point is repeated. If a robot joint is instructed to move by the same angle from a certain point a number of times, all with equal environmental conditions, it will be found that the resultant motions lead to differing displacements . Although a target is always missed by a large margin, if the same error is repeated, then we say that the repeatability is high and the accuracy is poor.
How to assure safety of robot operators ?
Unintentional physical human-robot contact is becoming more common as robots operate in closer proximity to people. This contact may generate a large impact force and cause severe human injuries. Therefore, the ability to reduce the human-robot impact force and ensure human safety is a fundamental requirement for human-friendly robots. An easy and effective way to achieve this is using foam to cover the robot surface. We present a method for designing the stiffness and thickness of the foam covering based on a realistic safety threshold and an improved impact force model.Our model incorporates the previously neglected coupling of the human head to the torso and the coupling of the robot arm to its base
Feedback
| Identifying the geometric relationship between input and output motions of a robot manipulator(viz. PUMA 560) : | |||
| Not Clear | Somewhat Clear | Well Understood | Can't say |
Knowing how a homegenous transformation matrix can be used to establish relationship between succesive links of a manipulator |
|||
| Not Clear | Somewhat Clear | Well Understood | Can't say |
Showing how a kinematic chain of a PUMA 560 with six joints is represented in a forward kinematic chain. |
|||
| Not Clear | Somewhat Clear | Well Understood | Can't say |
Makeing the Matlab codes for the forward kinematics of PUMA 560 |
|||
| Not Clear | Somewhat Clear | Well Understood | Can't say |
Simulating the motion of the robot for various inputs. |
|||
| Not Clear | Somewhat Clear | Well Understood | Can't say |