PUMA560
Programmable Universal Machine for Assembly, more popularly known as PUMA is an industrial robot arm developed by Victor Scheinman at Unimation, in the year 1978.PUMA comes in various makes viz. PUMA 260, PUMA 560, PUMA 761 etc. Our study here is concentrated on the PUMA 560 robot as we have direct access to it through our labs
Workspace:
The reachable workspace of a robot's end-effector is the manifold of reachable frames.
Accuracy:
Accuracy refers to a robot's ability to position its wrist end at a desired target point within the work volume, and it is defined in terms of spatial resolution. It depends on the technology and the control increments.
Repeatability:
Repeatability is a statistical term associated with accuracy. If a robot joint moves by the same angle from a certain point a number of times, all with equal environmental conditions, the target is always missed by a large margin. If the same error is repeated, then we say that the repeatability is high and the accuracy is poor.



![]()
|
ANGLE |
RANGE |
DEFAULT |
NAME |
|
Theta1 |
-160 to 160 |
90 |
Waist Joint |
|
Theta2 |
-110 to110 |
-90 |
Shoulder Joint |
|
Theta3 |
-135 to 135 |
-90 |
Elbow Joint |
|
Theta4 |
-266 to 266 |
0 |
Wrist roll |
|
Theta5 |
-100 to 100 |
0 |
Wrist bend |
|
Theta6 |
-266 to -266 |
0 |
Wrist swivel |




![]()
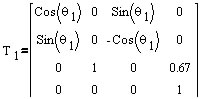
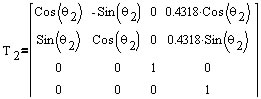
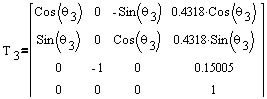
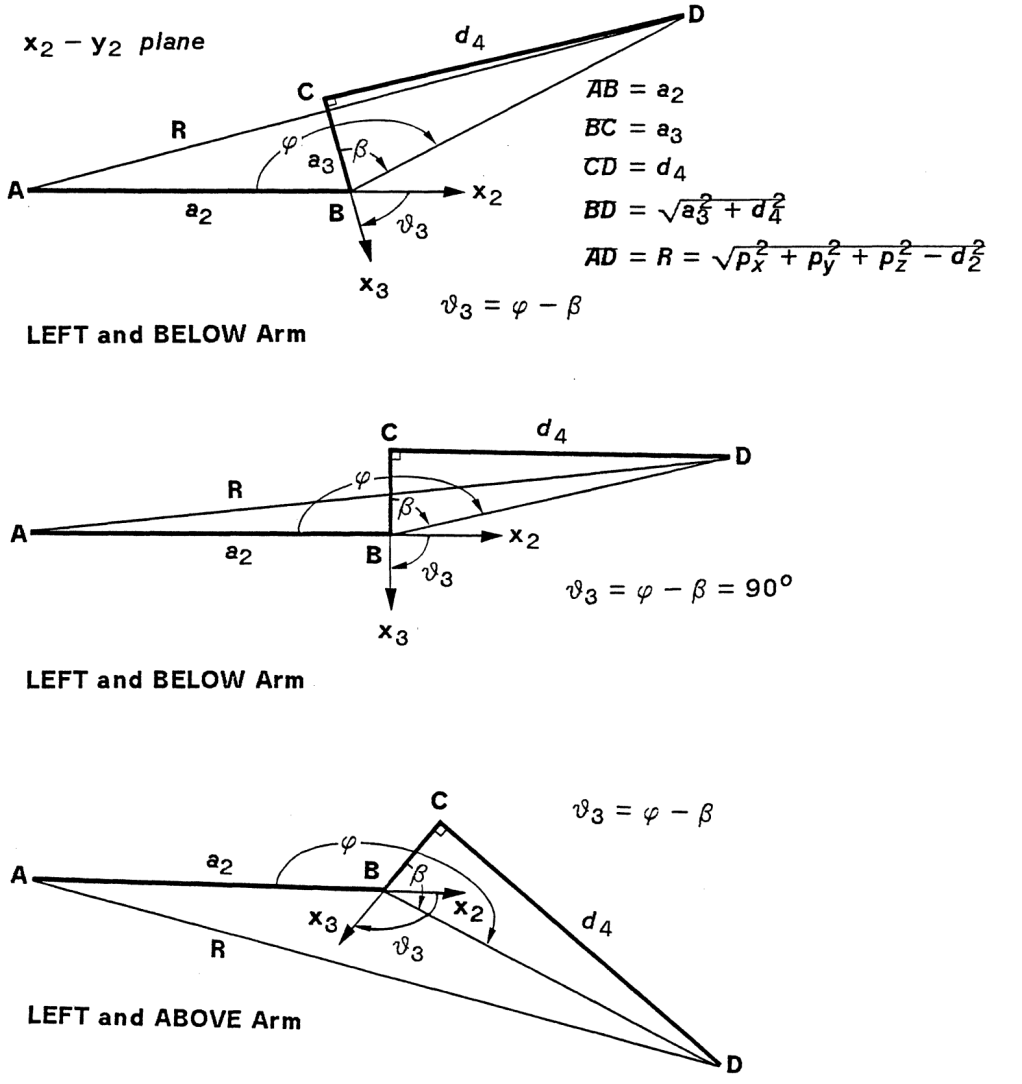
INVERSE
KINEMATICS
Which corresponds to 0T4 position
![]()

SOLUTION OF JOINT1


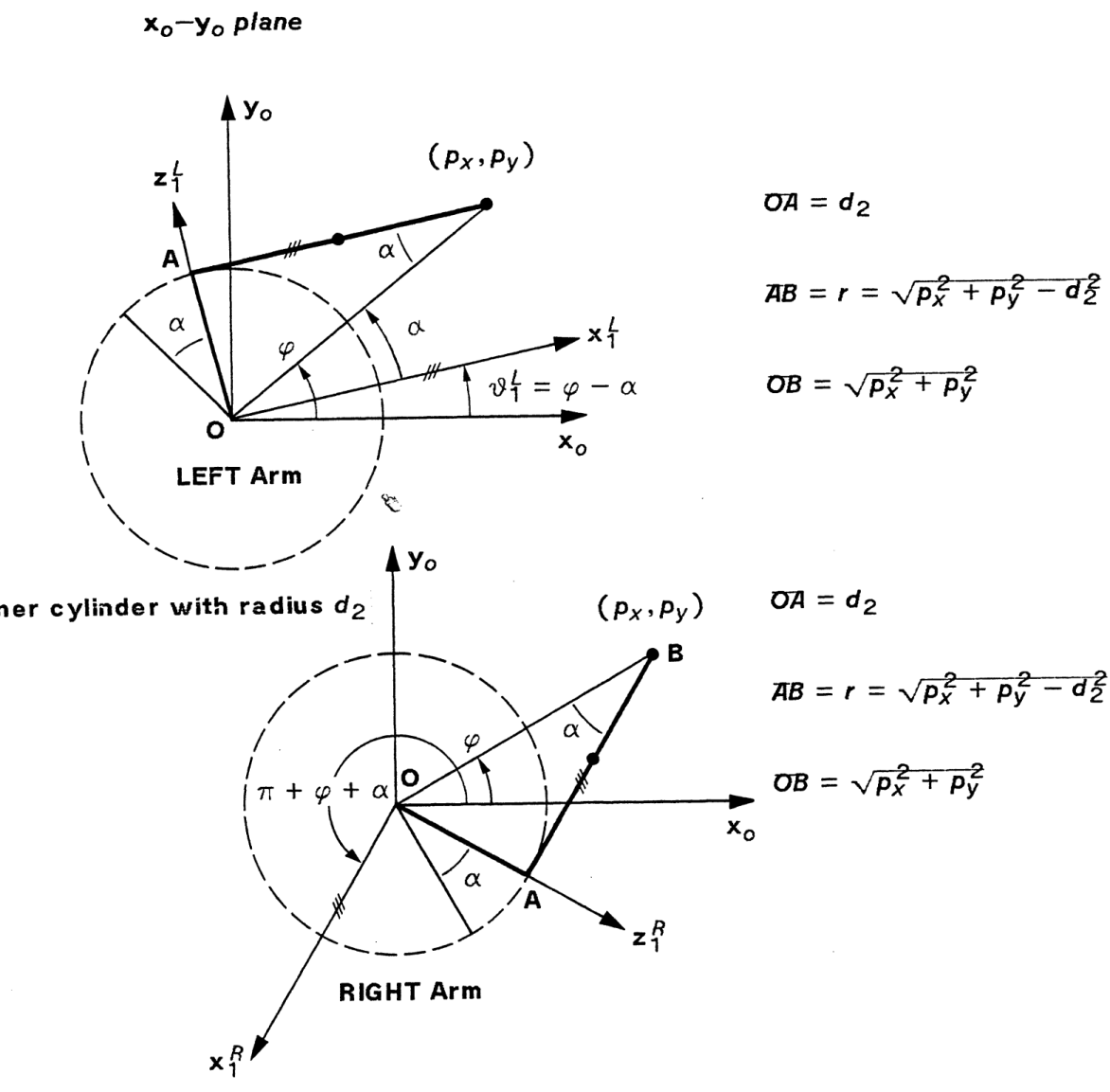



JOINT 2 SOLUTION






JOINT3 SOLUTION

![]()

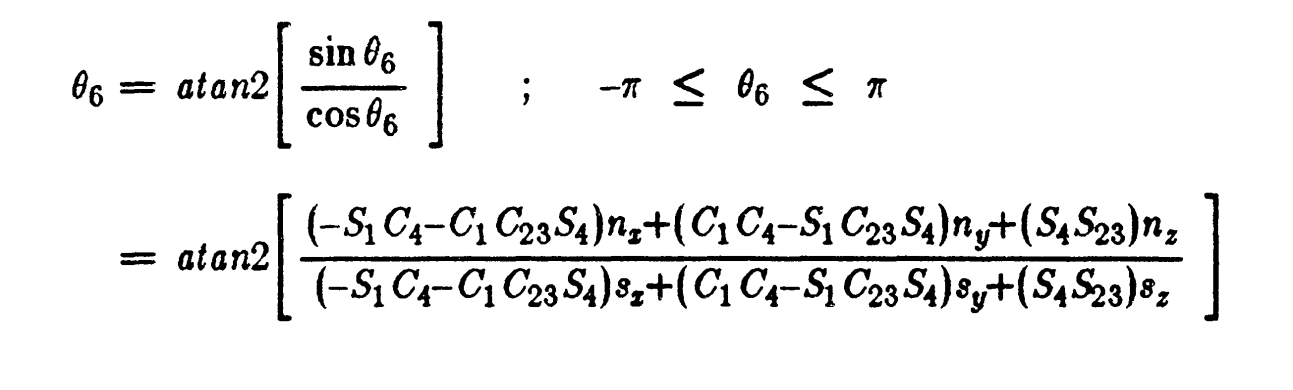
JOINT4 SOLUTION

JOINT5 SOLUTION:

![]()
JACOBIAN
In vector calculus the Jacobian matrix is the matrix of all first-order partial derivatives of a vector- or scalar-valued function with respect to another vector.
The Jacobian of a function describes the orientation of a tangent plane to the function at a given point. In this way, the Jacobian generalizes the gradient of a scalar valued function of multiple variables which itself generalizes the derivative of a scalar-valued function of a scalar. Likewise, the Jacobian can also be thought of as describing the amount of "stretching" that a transformation imposes. For example, if (x2,y2) = f(x1,y1) is used to transform an image, the Jacobian of f, J(x1,y1) describes how much the image in the neighborhood of (x1,y1) is stretched in the x and y directions.
Jacobian for PUMA 560


The forward kinematics equation indicates that the position element are determined by the first three joint variables.