
Research at Robotics and Intelligent Systems Lab
Undergraduate Research Support for Underwater Robotics
The objective of this project is to facilitate a continuing learning and development autonomous systems in underwater robotics. Currently an autonomous underwater vehicle (AUV) is being considered in this project. A robotic system working underwater in an autonomous mode is a big challenge to design and implementation of complex intelligent systems. Students at IIT Kharagpur are being encouraged to take up this at various levels and develop innovative solutions. The Research on AUV will focus on various aspects of engineering and science through multi-functional cross disciplinary groups including innovative mechanical design, control Systems, Machine Vision, Precise Navigation, Advanced Artificial Intelligence techniques and development of related indigenous technology. Several interesting outcomes are expected from this project, namely, a Vision guided and controlled AUV; Navigation system based on Acoustic array; Swarm Robotic for Autonomous underwater vehicle using acoustic communication; Development of accurate underwater simulator for robotics application; 3D-SLAM (Simultaneous localization and mapping) of autonomous underwater vehicles using Sonar and Vision.
Undergraduate research in Humanoid Robotics
Humanoid robotics with bipedal walking has attracted several researchers and bright students worldwide as these robots challenge the young minds with interesting problems. These range from bipedal walking, postural stability control, light weight mechanical design for efficient energy usage, intelligence in vision, gait, actions etc. There are also exciting research challenges in multi-robot interactions as in robo-soccer etc. In this project the student teams are working on models of developed adult-size humanoid robots with capabilities of Environmental Perception – that senses the environment so as to follow a collision free path; Adaptive Gait control that develops the motion trajectories of the robot so that it can perform in an unknown environment with a stable foot placement algorithm; Mechatronic system which involves a development of a robust mechanical system that can handle a wide range of environments and perform jobs like picking, throwing, swinging.
Biomedical Robotics for neuro-controlled prosthesis
Robotic systems for assistance and rehabilitation focus on providing missing movements and sensing, providing safer environments, and providing environments that make regaining movement-related function easier and faster. Robotic prosthetics and exoskeletons will provide dexterity, natural mobility, and sense of touch to missing or paralyzed limbs. These techniques are aimed at improving the patient’s motor performance, provide rigorous rehabilitation regimen, and shorten the duration of rehabilitation procedure, and provide objective data for evaluation of patient’s progress during and after the rehabilitation. We are currently interested in conducting experiments on Electromyogram signal (EMG) based control architecture developments for prosthetic limb and rehabilitation aid such as exoskeleton and Study of Electroencephalogram (EEG) and sEMG based control interface for bionics limbs and rehabilitation aids.
Main thrust areas being
1. Development of limb prosthesis/ exoskeleton control through neuromuscular signals e.g. EMG, EEG etc.
2. Development of therapeutic devices and treatment planning for stroke rehabilitation from neuromuscular signal
3. Development of neuro-signal driven control architecture for external mobility aids in embedded platform
4. Design & fabrication of prototypes of upper limb prosthesis & exoskeleton using 3 D metal & plastic fabrication facilities available
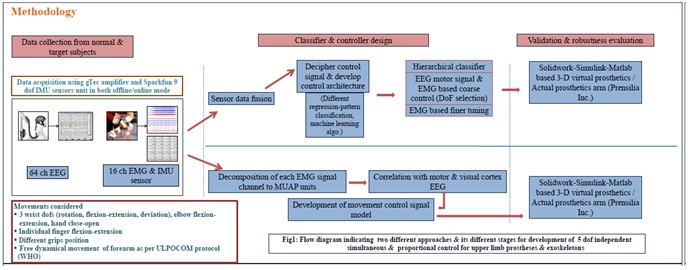 We are acquiring neuromuscular signals, mostly noninvasive high resolution EEG, EMG from normal subjects during limb movements using gTec Hiamp (gTec Inc. Austria). This will lead to the understanding and decoding of the control maneuver embedded in biosignals for different limb movements. This knowledge will help us to compare the similar movements and relevant control signals for amputee and paralyzed subjects. It is believed to be helpful in developing the control schematic for necessary robotic aids, prosthesis, exoskeleton etc.
We are acquiring neuromuscular signals, mostly noninvasive high resolution EEG, EMG from normal subjects during limb movements using gTec Hiamp (gTec Inc. Austria). This will lead to the understanding and decoding of the control maneuver embedded in biosignals for different limb movements. This knowledge will help us to compare the similar movements and relevant control signals for amputee and paralyzed subjects. It is believed to be helpful in developing the control schematic for necessary robotic aids, prosthesis, exoskeleton etc.

 Data acquisition for normal subjects during various upper arm movements using gTec device with 8 bipolar channel configuration
Currently, in association with Dr. Rajesh Pramanik from department of PMR, IPGMER SSKM Kolkata, we are acquiring data from amputee and paralyzed subject groups.
Data acquisition for normal subjects during various upper arm movements using gTec device with 8 bipolar channel configuration
Currently, in association with Dr. Rajesh Pramanik from department of PMR, IPGMER SSKM Kolkata, we are acquiring data from amputee and paralyzed subject groups.
 Data acquisition for unilateral amputee subjects during various upper arm movements using gTec device with 8 bipolar channel configuration
In a similar activity, along with Dr. M. Manjunatha from SMST, IIT Kharagpur, we are developing a system for post stroke rehabilitation of hand functions using a low cost robotic exoskeleton under a project granted from MHRD India as IMPRINT activity.
Three research scholars and other master scholars are working in different section of this domain.
Related projects:
MHRD sponsored IMPRINT project on upper limb exoskeleton based rehabilitation for stroke patients.
Data acquisition for unilateral amputee subjects during various upper arm movements using gTec device with 8 bipolar channel configuration
In a similar activity, along with Dr. M. Manjunatha from SMST, IIT Kharagpur, we are developing a system for post stroke rehabilitation of hand functions using a low cost robotic exoskeleton under a project granted from MHRD India as IMPRINT activity.
Three research scholars and other master scholars are working in different section of this domain.
Related projects:
MHRD sponsored IMPRINT project on upper limb exoskeleton based rehabilitation for stroke patients.
Grasping and Manipulation by Anthropomorphic Multi-fingered Hands
We are carrying out work on Grasping and Manipulation by Anthropomorphic Multi-fingered Hands. The aim is to develop hand designs and grasping and manipulation algorithms for better performance in human environment. Anthropomorphic hands are especially desirable for their aesthetic appeal for operating autonomously in human environment. We are considering underactuated hands for their ease of control and low weight and cost because of the smaller number of motors that they use. We are presently working on design of hand for workspace maximization. Larger the workspace of the hand more will be its dexterity for precision manipulation. In the case of underactuated hands the workspace gets reduce by a large amount (as low as 5% of the fully actuated hand). This is because the underactuated hand can’t apply the force needed to grasp the object at all locations. By properly selecting design parameters (like the spring constants for coupling springs) we increase the workspace to as high as 50% of the fully actuated hand. We have first focussed on symmetric hand and are now extending the results to anthropomorphic hands.
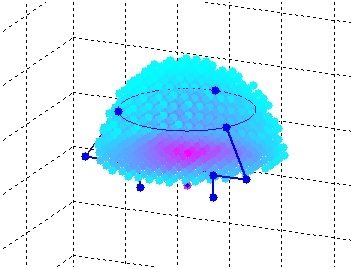 Position and orientation workspace of three-fingered fully actuated hand. More number of orientations possible at points with darker pink colour and the least for points with light blue colour.
Position and orientation workspace of three-fingered fully actuated hand. More number of orientations possible at points with darker pink colour and the least for points with light blue colour.
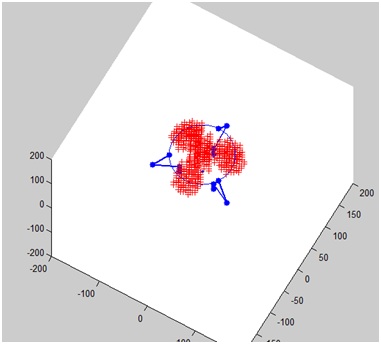 Manipulation workspace of underactuated symmetric hand. The two flexion phalanges of each finger are coupled to each other by springs. They are pulled by the same tendon. A proper selection of the spring constants can give a workspace of 40% of the fully actuated hand and the manipulation workspace is shown in this figure.
Work on open-source prosthetic hands for experiments is being carried out along with the hardware interface.
Manipulation workspace of underactuated symmetric hand. The two flexion phalanges of each finger are coupled to each other by springs. They are pulled by the same tendon. A proper selection of the spring constants can give a workspace of 40% of the fully actuated hand and the manipulation workspace is shown in this figure.
Work on open-source prosthetic hands for experiments is being carried out along with the hardware interface.
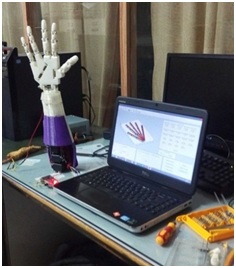 Assembled open-source prosthetic hand along with Matlab interface
Assembled open-source prosthetic hand along with Matlab interface
Virtual and Remote Robotics
Development of Industrial Robots KGP 50
Telerobotic control in QoS Test Bed
Coming Soon......
Actin based remote Control of Cyton Robot
Coming Soon......
Visual Servoing of PUMA 560
Coming Soon......
Vision based Micro gripper Control
Coming Soon......
Wireless Sensor Networks in Underwater Robotics
Wireless sensor networks (WSN) are an emerging technology with an exponential growth with wide range of potential application in various fields. Applications include environmental monitoring, precision agriculture, structure and earth quake monitoring, security systems, industrial process monitoring, smart spaces, medical systems, underwater tracking and robotic exploration etc. Moving object tracking in sensor networks is an interesting application where the sensor nodes enable us to acquire the knowledge of moving object’s location. A distributed network of sensor nodes acquiring or measuring some signals from a moving object can be configured or programmed to determine the trajectories of the moving object in the field of observation of the sensor nodes. This information can then be made available at base station with its networking capabilities. Such methods are increasingly finding their place in the field of motion tracking amongst various traditional fixed sensor based methods which are usually infrastructure based and not reprogrammable. Main aim of this work is to study and evaluate estimating techniques for path tracking using wireless sensor networks and to minimize the error due to variation in DOP values due to sensors positions. In order to accomplish this, theoretical models need to be developed using statistical estimation techniques. A simulator is needed to simulate the performance of developed models. A testbed has to be established for laboratory level experimental validation of developed models. In this work a tracking system for wireless sensor networks is proposed and validated. This system includes a network of sensor nodes, base station and a computer for estimating the moving object’s track. Hardware programs for sensor nodes and moving object have been developed. IEKF estimation methods have been considered and these methods have been simulated and evaluated using the developed simulator.
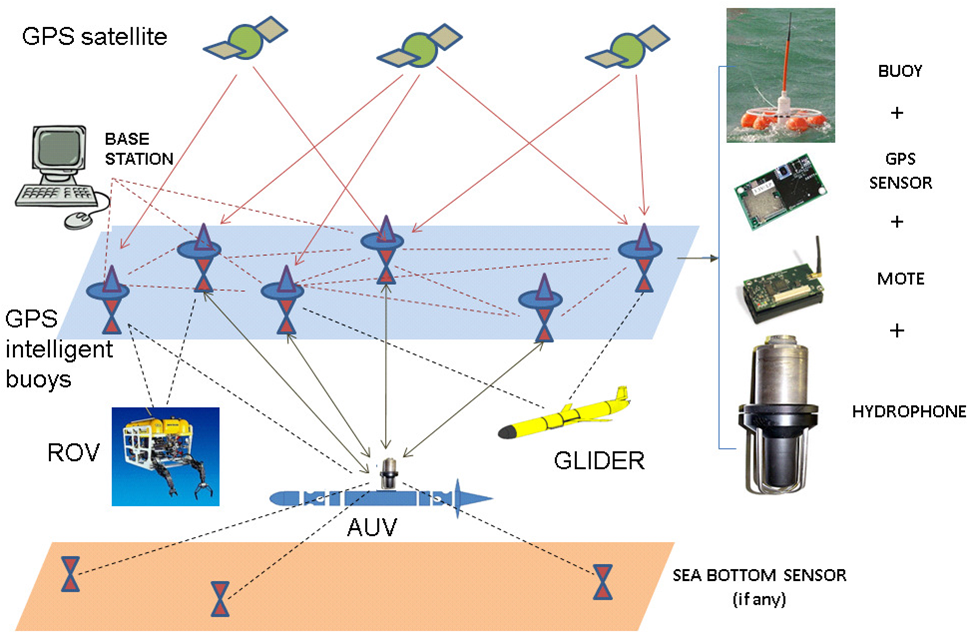
Underwater Wireless Sensor Network
Bio-inspired Robotics: Micro Gripper design, Fabrication and control
Microgripper is one of the key elements in microrobotics and microassembly technologies for handling and manipulating micro objects such as micro mechanical parts, electrical components, biological cells, micro materials etc. As the trend towards miniaturization continues, microgrippers will become indispensable tools for handling, manipulating as well as assembly of micro components in various application fields (optics, electronics, mechanics, fluidics, chemistry and life sciences). Interestingly, biological creatures like arthropods (e.g. crabs, lobsters, ants, etc) have simple yet effective gripping mechanism and can regulate their stiffness in their joints quite easily without much sensory information. Therefore, study of arthropods grasping mechanism and the related bio-inspired design is a very promising approach for developing miniature grippers. Implementing them in real devices can enhance the compliance and applicability of microgrippers for several applications (e.g. biological sample handling, precision assembly etc.). In the present work a new concept in the design of a microgripper based on a biologically-inspired approach is developed. A study has been done on the grasping mechanisms with variable stiffness in the joints inspired by arthropods specifically crustaceans like crabs, lobsters etc. A systematic design procedure for planar two-fingered microgripper based on the bio-inspired actuation is developed and the geometry of the microgripper is optimized to get maximum displacement subjected to constraints in operation and manufacturing. A dynamic model of single piezo and dual piezo actuated microgripper is developed and the dynamic performance of the design is studied. The model is simulated using SIMULINK for predicting the dynamics of microgripper mechanism and control schemes are developed for microgripper tip displacement and gripping force control. Two prototypes of microgrippers (one with a single piezo actuator and the other with four piezo actuators) are manufactured with Wire-Electro-Discharge Machining process from the design models of the microgrippers. These are fabricated to test and validate concepts presented earlier. Finally a suitable vision based measurement system for microgripper is implemented and experimental setup has been developed for characterization, testing, demonstration and control of the microgrippers.
Electronic Stability control on Electric Vehicles
ESC systems of today are reactive in nature , they use yaw rate sensor to determine loss of slip and give corrective output accordingly. These systems are limited as the vehicle has to loose control before the system gets into action. To further develop these systems predictive control systems have to be implemented. For predictive systems, continuous monitoring of critical vehicle states is required. Tire state( tire forces and orientation) are critical for handling and safety, but sensors available for their measurement are expensive for passenger car implementation. (about 400,000 Euros)
FSAE Car : Motion and ride control
Coming Soon......
Micro and Nano manipulation using Haptics
Coming Soon......
Muscle Models for Robotics
Coming Soon......
Neural Network Modelling of Blast furnace
Coming Soon......