Results and Discussions
In industrialized countries, 40-50% of energy is consumed by induction motors and 90% of the failures in machines occur due to malfunction of the motor. The most important mechanical failures are rotor broken bars, bearings damage, irregular gaps due to static or dynamic eccentricities, unbalances etc. In Acoustic and Condition Monitoring laboratory experiments are performed to study the fault present in 4 different types of motors:
1. Normal AC motor
2. AC motor with built-in broken rotor
3. AC motor with built-in bowed rotor
4. AC motor with rotor misalignment
1. Broken Rotor Bar
During startup current migrates at the top of the rotor bar,this leads to a temperature difference between top and bottom of the rotor bar.This contributes to mechanical stresses being placed on the joints.
During acceleration several stresses are placed on the joint between the end ring and the rotor bar
The frequency of the sidebands due to broken rotor bar is given by Kliman(1988) is
Where, k/p = 1, 3, 5, 7
.
Now, rotor speed (Hz) is given by fr = fs(1-s) and frequency of the current flowing in broken rotor bar is s×fs. It can be resolved into positive and negative sequence component. The positive sequence rotor current results in the positive sequence emfs and positive sequence current in the stator which gives rise to a abnormal sidebands and the frequency of that is given as
While negative sequence rotor current results in negative sequence emfs and current in the stator which also gives rise to a abnormal sidebands and the frequency of that is given by Equation

Equations can be generalized as:


Now using above equations the defect frequency can be written as
Where, k/p = 1, 3, 5, 7
.
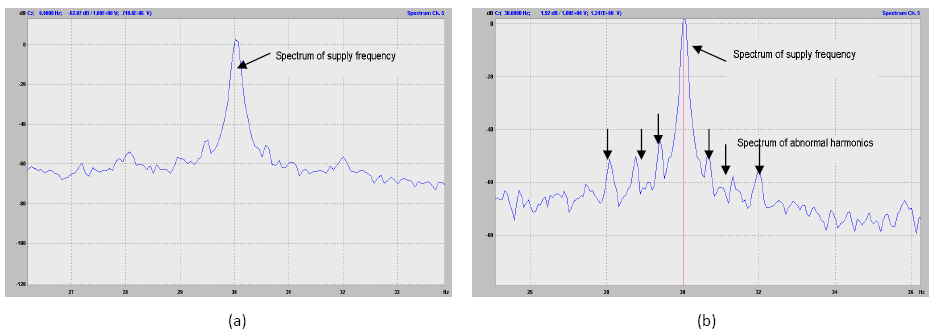
Fig 1: Experimental current spectra of (a) Normal motor (b) Motor with three broken bars at 30 Hz supply freq. and 0.0089 slip.
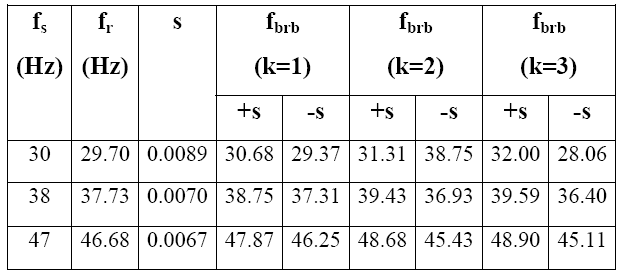
Table 1: Frequencies due to broken rotor bar at 3 different speed and 3 different values of K
2. Bowed Rotor
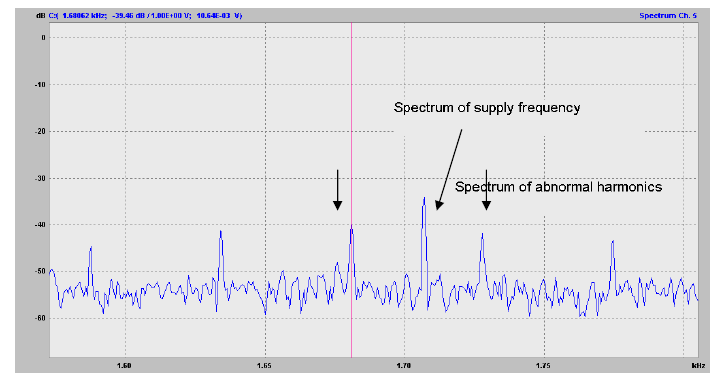
Fig 2: Experimental current spectra of AC motor with bowed rotor at 47 Hz supply freq. and 0.00638 slip.
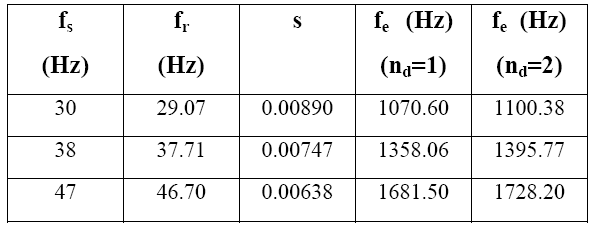
Table 2: Frequencies due to bowed rotor at 3 different speed and 2 different values of nd
3. Rotor Misalignment
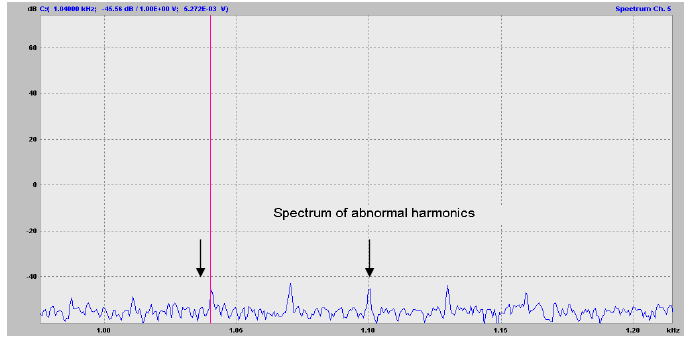
Fig 3: Experimental current spectrum of AC Motor with rotor misalignment at 30 Hz supply freq. and 0.0089 slip.
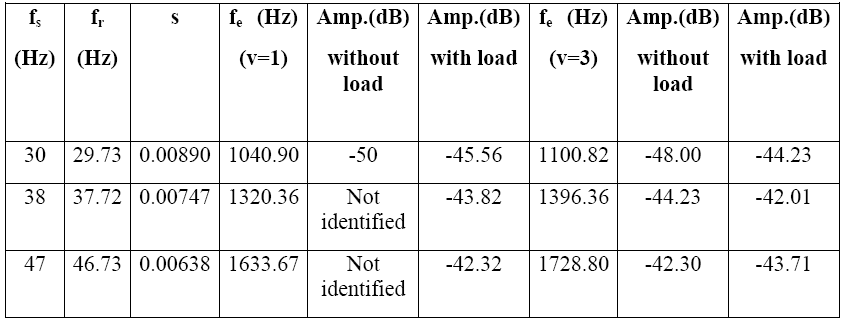
Table 3: Frequencies due to rotor misalignment at 3 different speed and 2 different values of v




.gif)